Geospector DTS – Applications
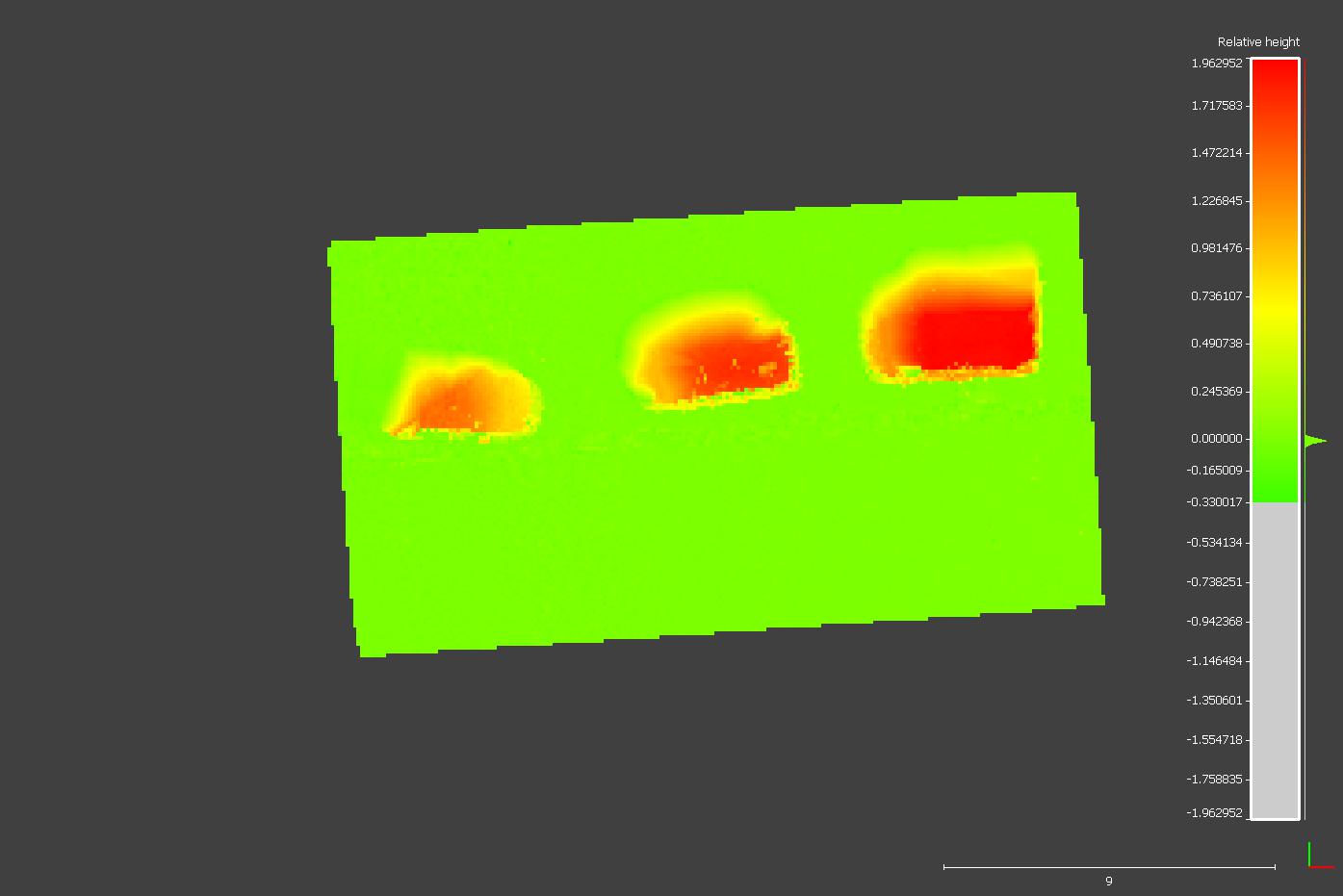
Volume Determination in Real-time
see our detailed report:



Surveying forestry
see our detailed report:

Original point cloud
Classified point cloud (vegetation / ground)
Elevation model (DEM)



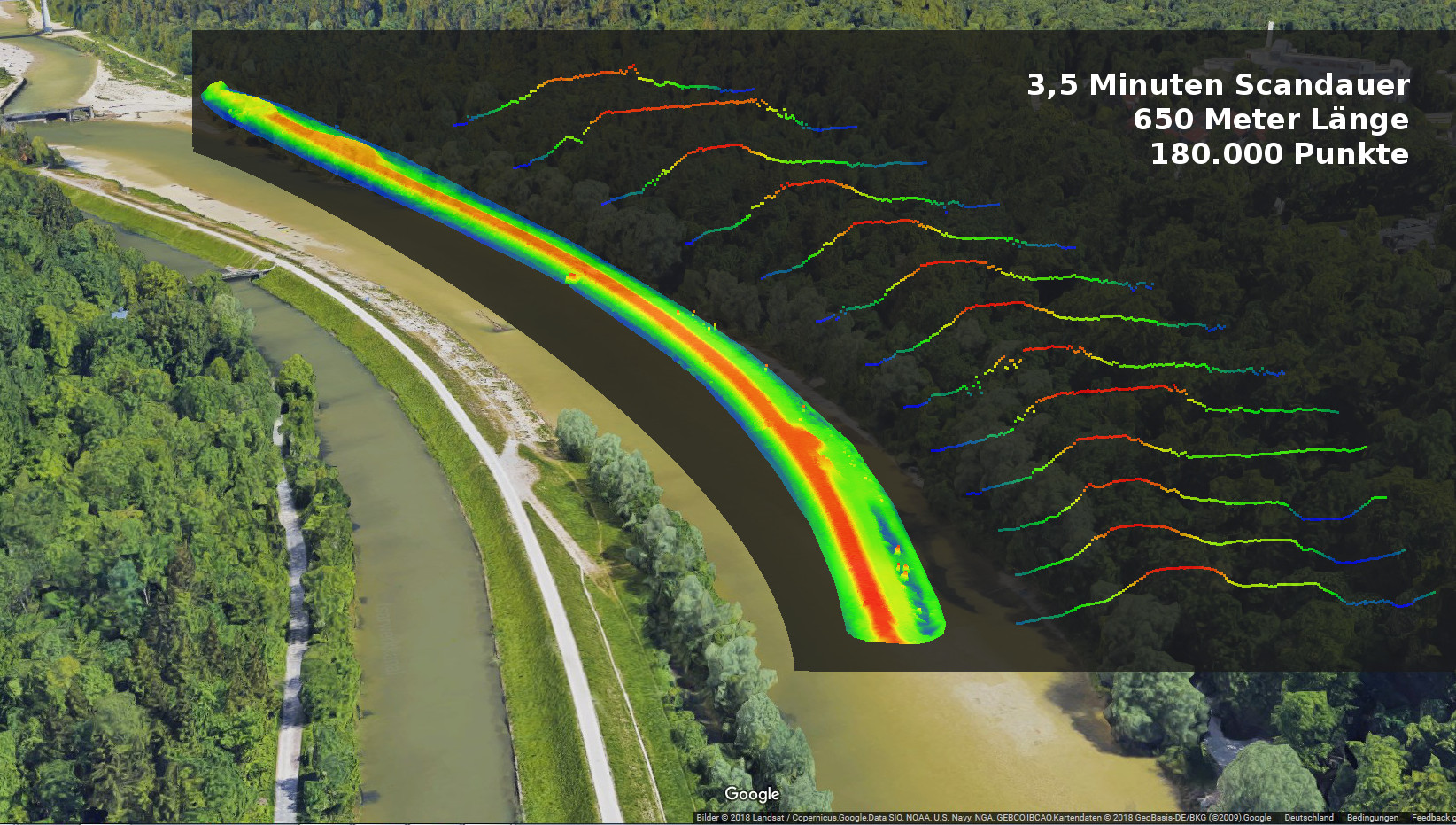
Surveying of Stretched Dam Construction
Accquisition of Isar dam near Pullach / Munich with light-weighted UAV (below 5 kg)
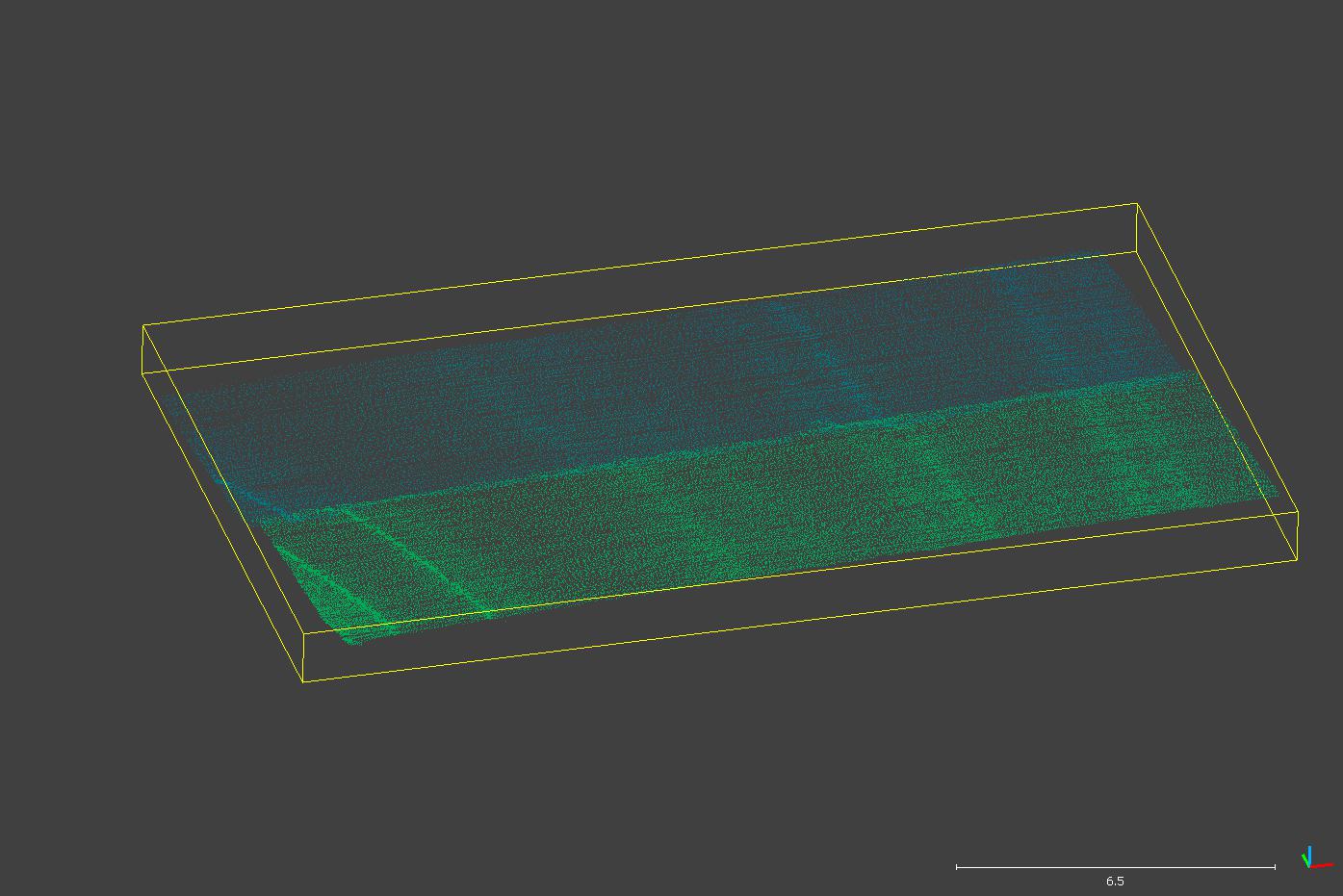
Surveillance of Railway Ramp Area (Stationary Scan)
The lasermapper has been mounted onto a pole with 15 meters height aside a railway ramp area.
Every 15 minutes an area-scan with 180.000 points has been performed (duration 3 minutes)

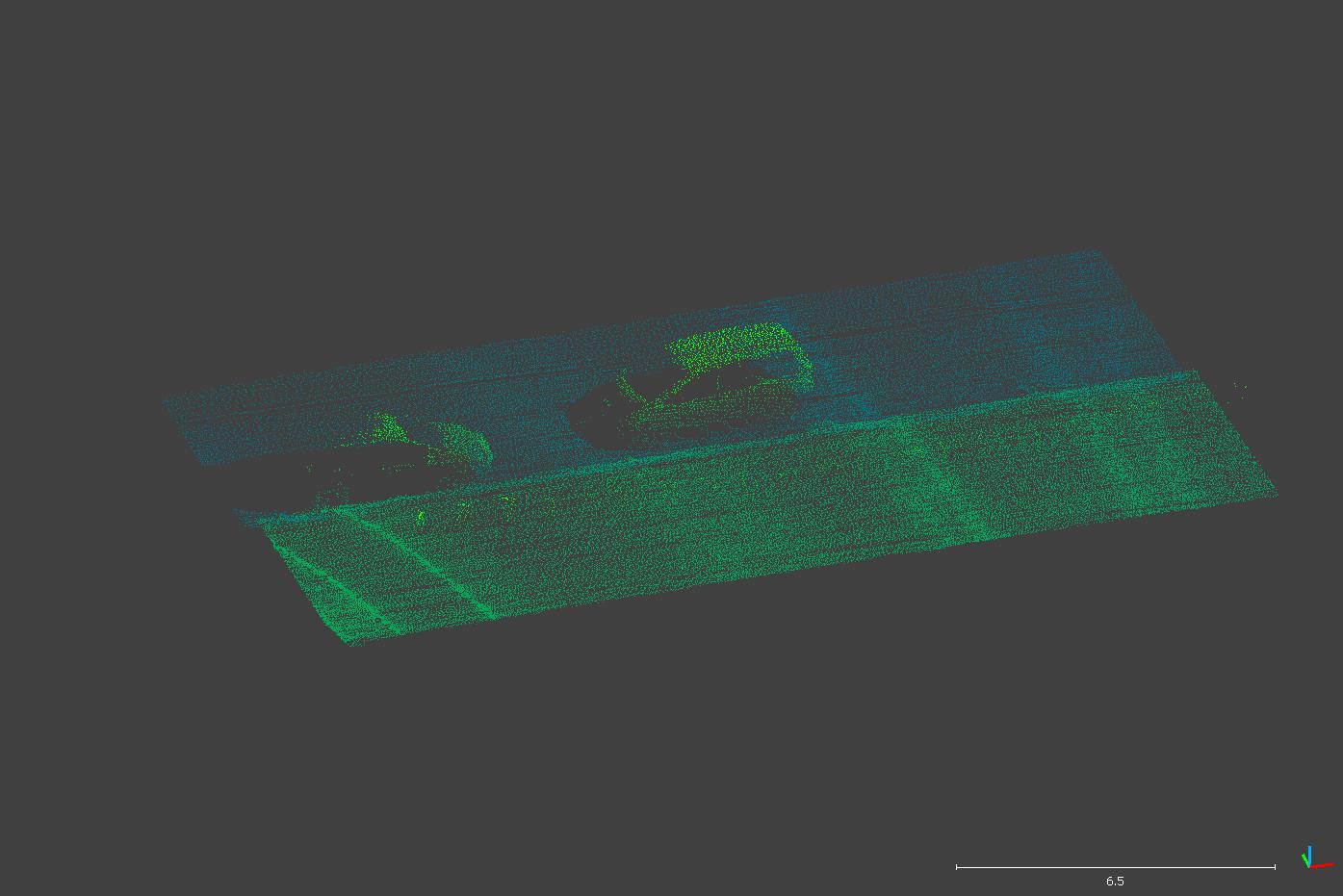
The excerpt along a street shows changing allocation of parking lots:
Point cloud reference measurement (without cars)
Point cloud with two cars
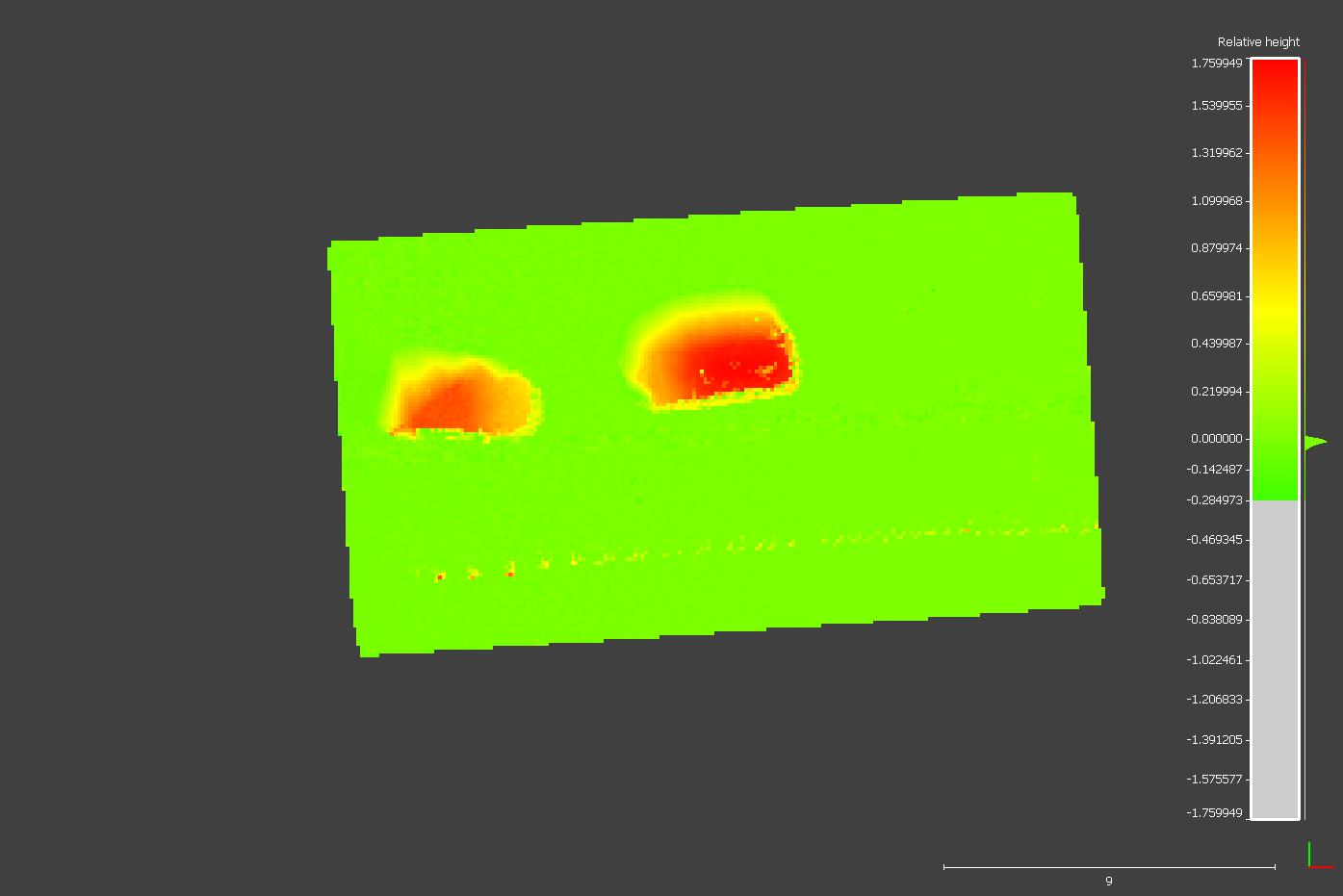
Volume model compared to reference
Point cloud with three cars

Volume model compared to reference